NVIDIA Isaac Simとは?
NVIDIA Isaac Simは、Omniverseプラットフォームを基盤とするロボティクスシミュレーションアプリケーションです。同時に合成データ生成ツールです。
Omniverseで構築したフォトリアリスティックな仮想空間(Digital Twin)に、ロボットなどのモデルのアセットをインポートして、ナビゲーションや操作のシミュレーションができます。AIベースのロボット開発、テスト、管理に最適で、ロボットの導入にかかる費用や導入作業工数の削減に効果があります。
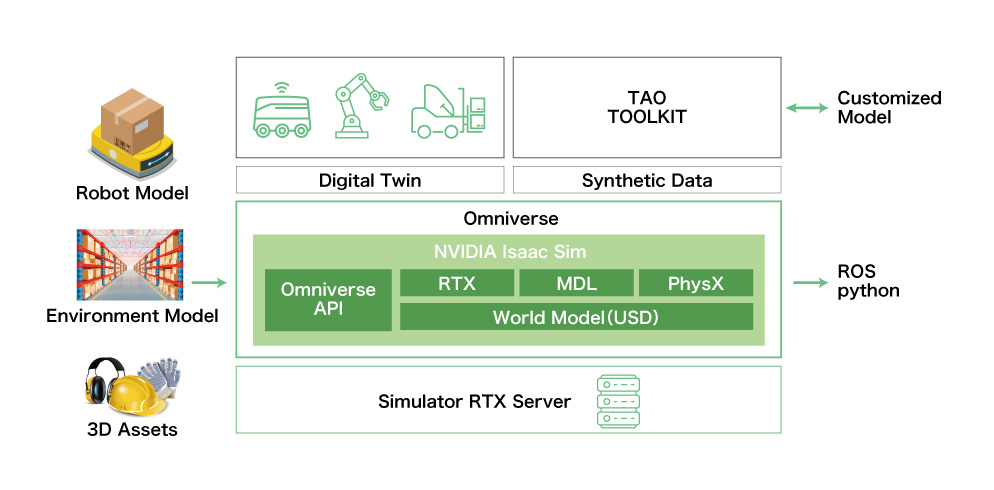
NVIDIA Isaac Simのダイアグラム
NVIDIA Isaac Simの特徴
リアルなシミュレーション
NVIDIA Isaac Simは、PhysXによる高度な物理シミュレーション、RTX GPUによるリアルタイムレイトレーシングとパストレーシングによるフォトリアリスティックな映像、MDLマテリアル定義による実物ベースのレンダリングなどを実現しています。
幅広い用途に対応するモジュラ型アーキテクチャ
単体のシミュレータでは、すべてのロボティクスシミュレーションの課題に対処するのは困難です。NVIDIA Isaac Simは、操作、ナビゲーション、トレーニングデータの合成データ生成など、ほとんどの一般的なロボティクスユースケースに対応できるように構築しています。また、モジュラ型のため、ツールをカスタマイズしてさまざまな新しいユースケースに拡張できます。
シームレスな接続性と相互運用性
NVIDIA Isaac Simは、Nucleusデータベースやコネクターを利用することで、ロボットモデルのインポートや構築をOpenUSDの統一環境で実行することが可能です。
Isaac SDKとROS/ROS2インターフェイス、フル機能の Pythonスクリプト、ロボットおよび環境モデルのインポート用プラグインを利用すれば、ロボットの頭脳を仮想世界に簡単に接続できます。
画像分類や物体検出モデルのトレーニング用に合成データを生成
認識モデルのトレーニングには、膨大な量と種類のデータセットが必要になります。十分なデータセットを収集するには、コストと時間がかかるうえ、ときに危険を伴い、不可能な場合もあります。NVIDIA Isaac Simの合成データ生成機能を利用すれば、開発者はトレーニングタスクを自前で行えるようになります。プロジェクトの初期段階で、概念実証を推進したり、MLワークフローを検証したりする際に合成データを利用できます。開発サイクルの後期には、実際のデータを補強するために合成データを使うことで、運用モデルのトレーニング時間を短縮できます。NVIDIA Isaac Simにはドメイン ランダマイゼーションが組み込まれているため、テクスチャ、色、照明、配置を変更することができます。また、バウンディングボックス、深度、セグメンテーションなど、さまざまな種類のデータをサポートしています。データセットはKITTI形式で出力できるため、NVIDIAのTAOTool kitを簡単に活用できます。
操作シミュレーション
ロボットの主要な応用分野の1つに、物体を識別し、持ち上げて動かすマニピュレータがあります。最新の工場や倉庫環境では、資材の運搬や選別にマニピュレータを利用することで、作業効率とスループットを大幅に向上できます。NVIDIA Isaac Simには、容器の充填や段積みといった一般的なタスクのサンプルが組み込まれています。Pythonベースのこれらのサンプルは、変更してカスタムタスクにも利用できます。UR10、Frank Emika Panda(Leonardo)、低コストのDofBotといったマニピュレータロボットをサポートしており、プロジェクトの適切な進行に役立ちます。
ナビゲーションシミュレーション
自律移動ロボットは、環境内のA地点からB地点に移動することが求められます。これを可能にしているのがNavigation Stackです。NVIDIA Isaac Simはロボットのナビゲーション機能の開発とテストをサポートします。ROS Navigation Stackの使用方法の包括的なサンプルを搭載しており、NVIDIA Carterロボットが倉庫内を自律移動できるようになっています。同様に、Carterで実行されるIsaac SDK Navigation Stackも、サンプルの1つを利用して簡単に実行できます。

NVIDIA Isaac Simへのロボットまたはアセットのインポート
ロボットモデルなどのアセットをロボティクスシミュレータにインポートすることは、重要な作業であると同時に、トレーニングやテストシナリオの準備における大きな課題でもあります。Omniverseのコネクタ機能を活用するNVIDIA Isaac Simは、主要な製品設計フォーマットをサポートしています。URDFインポートツールは、複数のロボットモデルでテスト済みです。またCADファイルは、Onshapeなどからの直接インポートのほか、STEPファイルからも最小限の後処理だけでインポート可能です。
hapeNetをサポートしているNVIDIA Isaac Simは、さまざまな環境に簡単にアセットを追加できます。ShapeNetインポートツールを使うと、膨大な量の 3Dアセットにアクセスできます。
お問い合わせ・資料DL
NVIDIA Omniverseに関するご相談や、各種資料ダウンロードはこちらから

NVIDIA Omniverseについては…… NVIDIA Omniverseへ
NVIDIA Isaac Simの合成データ生成機能は…… NVIDIA Isaac Replicator(Omniverse Replicator)へ
世界基盤モデル・フィジカルAI向けオープンプラットフォームは…… NVIDIA Cosmosへ