ロボティクスでは、ロボット・タスクのシミュレーションや検証が可能です。到達可能性の検討、インターロック解析、オフライン・ロボット・ティーチングを実行し、製造現場に最適なロボティクス・プログラムを実現するソリューションを提供します。
- 生産開始前からのバーチャルな設計・プロセス検証による、設備投資とミスや手戻りの削減
- サイクルタイムの削減による、製造ボリュームの増加
- 製造の柔軟性の最大化と変化する生産要件への柔軟で容易な対応
- 生産性の向上とリソース使用率の最大化
- オフラインでロボットをプログラミングすることによる、新製品のより迅速な立ち上げ
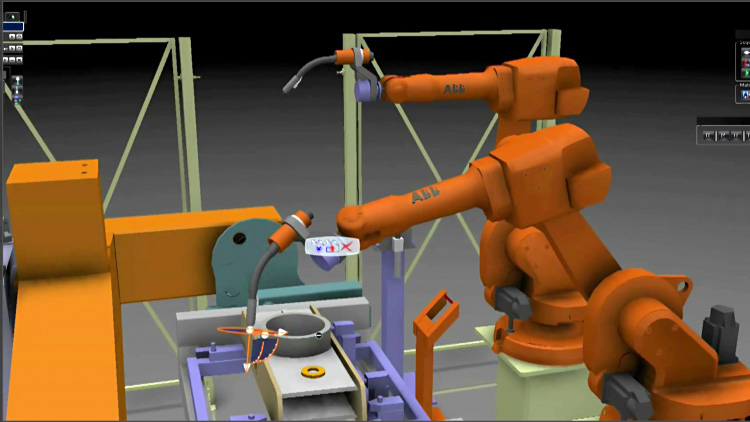
Robotics Arc Engineer アーク溶接ロボットをシミュレーション
ロボットによるアーク溶接ワークセル全体を作成、シミュレーション、検証できるインタラクティブな3D環境を提供します。
- 製造業向けのロボットアーク溶接ワークセル全体を作成、シミュレーション、検証できます。
- リソースの配置、ロボットのシミュレーション、ロボットの軌跡の作成、ロボットと他のデバイス間の完全なワークセルシーケンスの作成を行うことができます。
- 作業現場に納品する前に、ロボットアーク溶接のプロセスとセットアップを定義、検証、最適化できます。
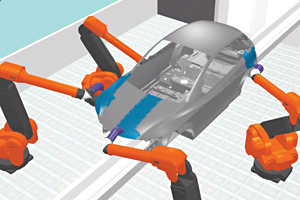
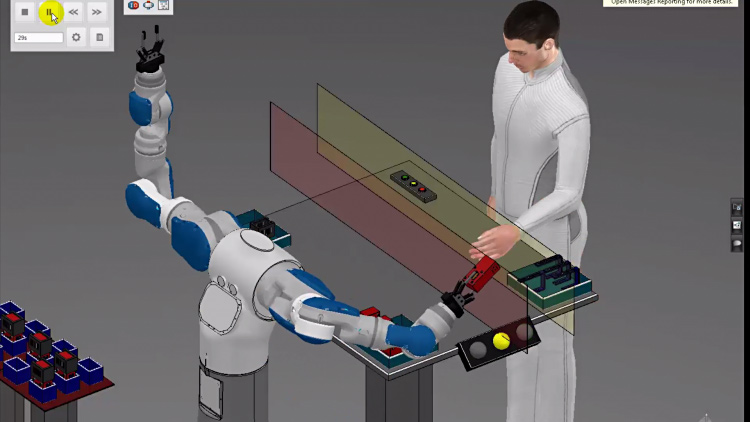
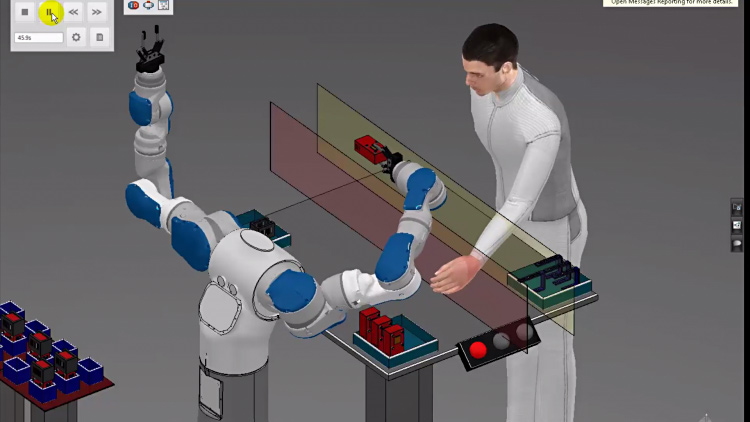
Robotics Engineer 工業用ロボットの動作をシミュレーションし、検証
マルチロボット・ワークセルでの干渉ゾーンとインターロックを計算でき、シミュレーションの状態を簡単に作成、変更、保存することが可能です。
- 複数のリソースのシミュレーションをデバッグし、エラーを容易に検出できます。
- DELMIAロボットライブラリに追加された最新の双腕ロボットモデルを使用できます。
- ロボットとその他のデバイス間の入出力信号を作成可能にし、シミュレーションで高度なロジックとI/Oをサポートします。
- ロボットの軌跡に沿ったターン数、アーム構成、ガントリー位置、レール値など、標準的なモーションパラメータを計算することにより、ロボットの動きを自動的に最適化できます。
- ロボットやツールの掃引空間をロボット・タスクの動きをもとに作成します。
- ユーザーがロボットを手の届く位置に配置しながら、ロボットのタスク全体を考慮できるツールを提供します。
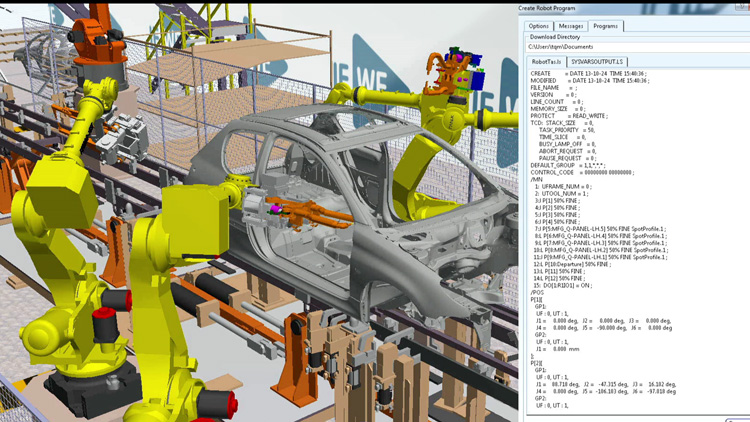
Robotics Offline Programmer ロボット・プログラムをインポートおよびエクスポート
実稼働ロボット・プログラムのインポートとエクスポートを可能にすることで、バージョン6のロボティクス製品を拡張します。
- ロボットの軌跡に最高度の精度を必要とするロボットアプリケーション向けに、精度を向上させる高度なワークセルキャリブレーション機能を提供します。
- 包括的なロボットオフラインプログラミングソリューションで、ワークピースポジショナー軸や定置ガンの使用などの高度なロボット工学アプリケーションをサポートしています。
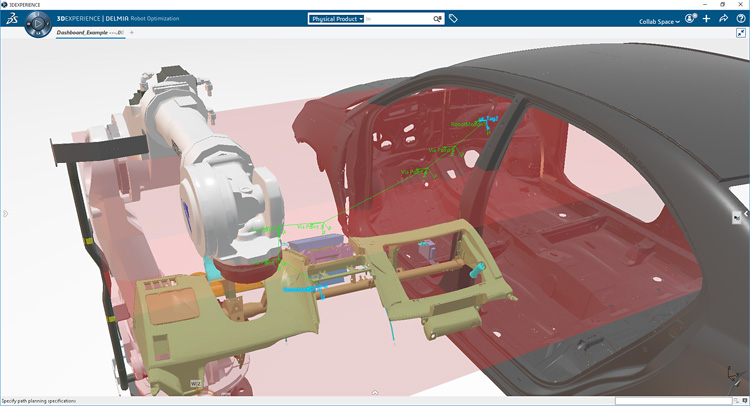
Robotics Optimization Expert 衝突のないロボット・パスを計算して最適化
ロボット軌跡の最適化と衝突のない軌跡の自動生成をします。
Robotics Spot Engineer スポット溶接および穴あけ/リベット機能を使用したロボット・ワークセルの作成とシミュレーション
ロボットのパス計画、溶接ガンの選択、分析のための高度な機能を提供し、エンジニアが新しい製品設計や変更される製品設計に迅速に対応できるようになります。
- ロボット・ワークセル全体を作成、シミュレーション、検証できます。
- リソースの位置決め、動作軌跡のデバッグ、ロボット・コントローラーと他のデバイス間の入出力接続の確立を行えます。
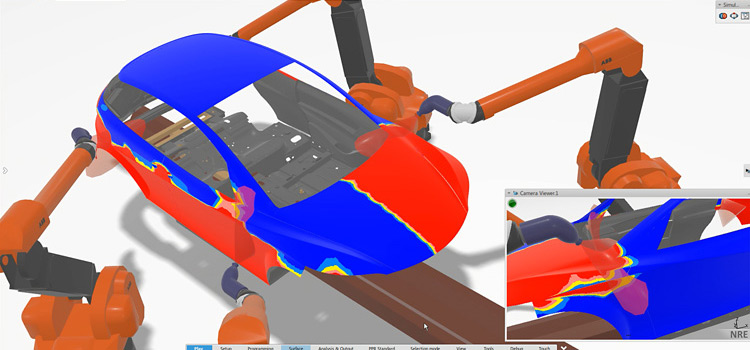
Robotics Surface Engineer ロボット・サーフェス・プロセスをシミュレーション、プログラミング、検証、および最適化
スプレー、ショットピーニング、研削、仕上げなどのロボット表面プロセスの作成とシミュレーションを容易にします。
- 製品ジオメトリを使用して、3D環境の没入型コンテキストでロボットのワークセルと高度なロボットプロセスを検証します。
- リソースの配置、ロボットの軌跡の作成、ロボット機能のシミュレーションを行い、完全なワークセルシーケンスを作成できます。
- 作業現場への納品に先立って、表面プロセスとセットアップを定義、検証、最適化できます。
- ライントラッキング機能により、最も正確なシミュレーションが確実に達成されます。