開発の早い段階での検証で、こんな課題はありませんか?

部品の組付け可否、経路がわからない。

作業性検証を試作で行うと、作成・設定変更に時間がかかり回数をこなせない。
また評価が検証者の主観となり数値化できていない。

作業者の体格違いの多様性を考慮できない。
組立負荷や作業性、安全性まで考慮した検証が難しい。
IPS PathPlaner、IMMA、VRで解決
デジタル開発における検証プロセスのためのソリューション。組付け・取り外しの経路シミュレーションのPathPlaner、組み立て作業性を検証するIMMA、作業体験・検証・作業手順作成を行えるVR、またこれらを組み合わせて使用することもでき、製品開発・組立計画・生産計画・サービス&メンテナンスの事前確認を行うことができます。
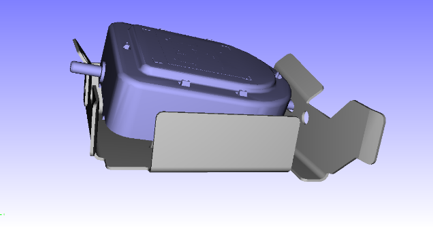
- ・組付け後の位置を指定し、干渉のない経路自動計算
- ・他部品とのクリアランスを考慮した計算
- ・部品との衝突を避けながらの手動検証
- ・キネマティクス構造と連動した経路計算
- ・組立経路のエンベロープ化
- ・人間工学に基づいた作業空間をレイアウト
- ・体格違いを一括解析
- ・到達性、視認性、組み立て性 検証
- ・容易な姿勢作成
- ・バックグラウンドで自動計算
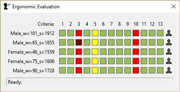
- ・様々なエルゴノミクス評価
RULA、REBA、EAWSスコア
Force Atlas、OWAS
Lower Back Risk Analysis
- ・作業のバーチャル体験
- ・デジタルツインによる周辺部品との接触フィードバック
- ・組付け経路の定義
- ・デスクトップとの連携ですばやい検証
- ・到達性、視認性の確認
- ・組付け経路を計算した部品を取り付けるデジタルヒューマンの評価
- ・経路計算した部品につながるケーブル評価
- ・VRで作成した作業フローを様々な体格のデジタルヒューマンにて作業再現評価
- ・VR上でのケーブル配索
- ・VRでデジタルヒューマンに憑依してのリアルタイムエルゴノミクス評価
IPS Path Planner
特長
オートマチック & グライダー & コンビネーション
- オートマチック &イージ ーオペレション
スタートポジション・ゴールポジションのみの設定で、干渉のない組み付け経路の計算実行が可能となります。専門的な知識は必要なく、だれでもスキルに依存しない経路計画を検証できます。
- ウェイトバランス
干渉対象物との距離確保を重視するか、最短経路を重視するか、部品の回転自由度を許容するか部品の移動範囲を許容するか、などの指標に対する重み付けをスライダーバーによりバランスを変えて計算を実行できます。 - パラメータコントロール
XYZ各軸に対しての許容角度、基準座標の指定など緻密なパラメータコントロールを行うことでユーザーの意思(制約条件)を反映させることができます。 - グライダー
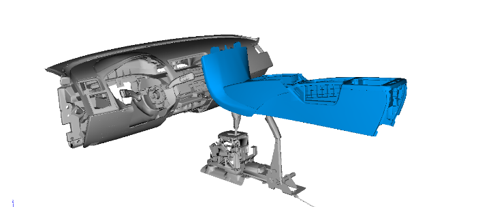
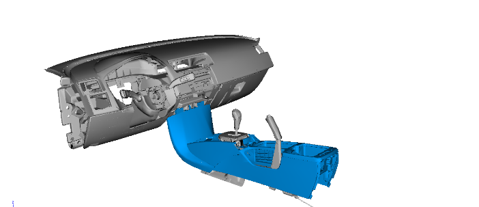
部品同士を(接触させて)滑らせながら、手動で組み付け経路検証を行うことができます。
部品同士が非常に緊密な位置関係にあり、自動経路計算が収束しづらい場合には、グライダーで移動させた位置関係を経由ポジションとしてセットすることで、計算収束を促すことができます。
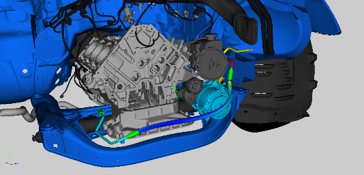
- ケーブルコンビネーション
IPS Cable Simulationとコンビネーションでシミュレーションを実行できます。例えば、ケーブルに接触しながら部品を分解するシーンを簡単に再現できますので、ケーブルを含めた組み付け性やメンテナンスサービス性のデジタル検証を簡単に行えます。
IPS Mechanism Path Planner
特長
ハンドクレーン、助力アームのような外部のキネマティクス構造と連動した組付け干渉回避パスを自動生成することが可能になり、定義した条件をもとにリアルタイムに解析することができます。
主な機能
- 製品/設備に機構を定義
- 定義した機構を条件として干渉のないパスを自動計算
- モーションボリュームの作成
- 周辺部品とのクリアランスを検証
IPS IMMA(デジタルマネキンシミュレーションツール)
IPS IMMAの優位性
デジタルマネキンシミュレーションを使用した製品設計段階での作業性評価は非常に重要な意味を持ちますが、従来のデジタルマネキンシミュレーションツールは、作業姿勢の作成に膨大な労力を必要とすることが多く、実務運用が限定的になる傾向があります。また、姿勢作成工数を削減するため、モーションキャプチャーシステムとの連携などを活用する場合でも、新たな準備工数の発生や場所の確保など課題が散在しており、やはり実務運用は難しい現状があります。
IPS IMMAは、オペレーターがマネキン姿勢を作成するのではなく、IPS IMMAが自動的に人間工学に基づき自然な姿勢を決定します。重心バランスを保ち、干渉オブジェクトをさける、ぶつからない姿勢が自動的に生成されます。従来の課題であった姿勢作成の工数を劇的に削減することで、運用可能なデジタルマネキン検証業務を実現します。
特長
イージー・オペレーション
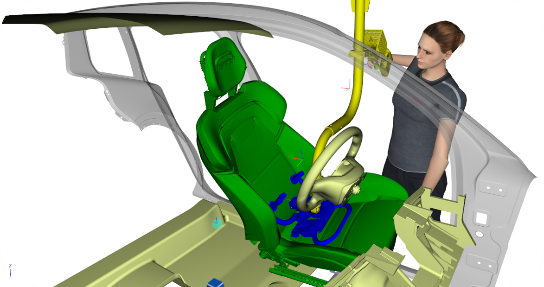
 マネキン姿勢自動生成(スタートポジション)
マネキン姿勢自動生成(スタートポジション)
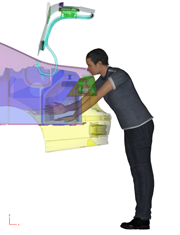
内部に組み込まれている干渉回避経路計算ロジックで生成されたアセンブリパスに合わせて、デジタルマネキンが自動で姿勢を取ります。この時、アセンブリ対象部品を保持する最適なグリップタイプを多彩なコンフィグレーションの中から選択することができます。
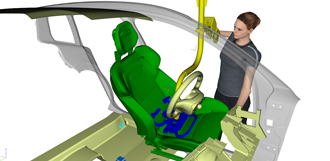
 マネキン姿勢自動追従(ゴールポジション)
マネキン姿勢自動追従(ゴールポジション)
アセンブリパスに追従した姿勢を自動で生成していきます。この過程で、重心が変われば、フットポジションを変えながらバランスが取れた姿勢を維持します。また、マネキン自身がレイアウトに干渉しそうになれば、体制を低くしながら潜り込むような姿勢も自動生成します。
オートマチック & イージーオペレーション
- オートマチック & イージーオペレーション
干渉回避経路計算ロジックが組み込まれており、デジタルマネキンが姿勢を自動生成しながら、シミュレーションができます。姿勢作成だけで多くの労力を必要とすることなく、短時間で作業性・到達可能性・現実性の事前評価を行うことができます。 - オペレーション・シーケンス
作業場所まで移動する、モノをつかむ、組み付ける、次の作業場所に移動するなど、作業順番をオペレーションシーケンスを使用して、直感的に定義することができます。

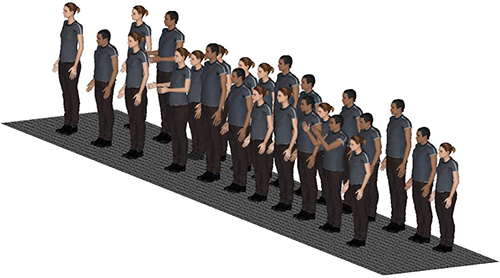
- マネキン・バリエーション
デフォルトで豊富なサイズ(身長、体型)のマネキンファミリーが用意されていますので、すぐにシミュレーションをスタートすることができます。ボディサイズを細かく設定することで、必要なマネキンパターンを作成することもできます。

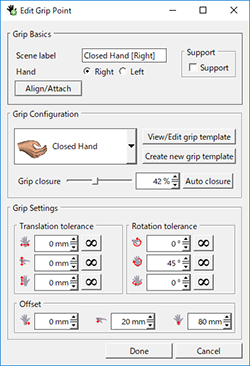
- グリップ・コンフィグレーション&エディット
アセンブリ対象部品のつかみ方を豊富なグリップコンフィグレーションから選択することができます。グリップタイプを編集して新しいタイプを定義することも可能です。

- エルゴノミクス解析
RULA (Rapid Upper Limb Assessment)解析を標準搭載し、IPS IMMAで作成した作業シーケンスへのエルゴノミクス解析が可能です。シーケンスデータから自動で解析を行いますので、スピーディな評価業務を行うことが可能です。また、ユーザー独自の指標を取り入れての評価を行えるようにカスタマイズできる環境が提供されます。

製品紹介ムービー





FAQ
-
- Q1IPS PathPlanner,IMMA,VRの主要機能は何ですか?
-
- Q2どのような開発、計画に活用できますか?
-
- Q3デジタルヒューマンの姿勢を制御するのは、難しく時間がかかると聞いたことがありますが?
-
- Q4エルゴノミクス評価はどのようなモノが用意されていますか?
-
- Q5クローズドループシミュレーションとはどのようなことですか?
- ※掲載されている製品、会社名、サービス名、ロゴマークなどはすべて各社の商標または登録商標です。
製品・サービスに関する
お問い合わせ
ご質問、ご相談、お見積もりなど
お気軽にお問い合わせください。
プロダクト営業部
TEL:03-5859-3012
E-mail:eng-sales@scsk.jp

